[Prototype test] Setting success criteria in goal-based prototype tests
Last updated: June 25, 2026
When setting up a prototype test, the underlying task can either be goal-based, or free explore.
The free explore option allows you to set up prototype tests with no defined goals/paths. Learn more about free explore tasks
On the other hand, in goal-based tasks, you set up success criteria to use as a benchmark for measuring the success of the mission. Establishing concrete success criteria gets you more quantitative metrics in the results, such as success rate, usability score, and misclick rate.
This article shows you how to define success criteria in a goal-based mission.
Before you start
It’s not possible to change the task type or the success criteria after sending the maze live. What changes can I make when editing a live maze?
Create a goal-based task
To create a goal-based task:
Import your prototype into a prototype test block.
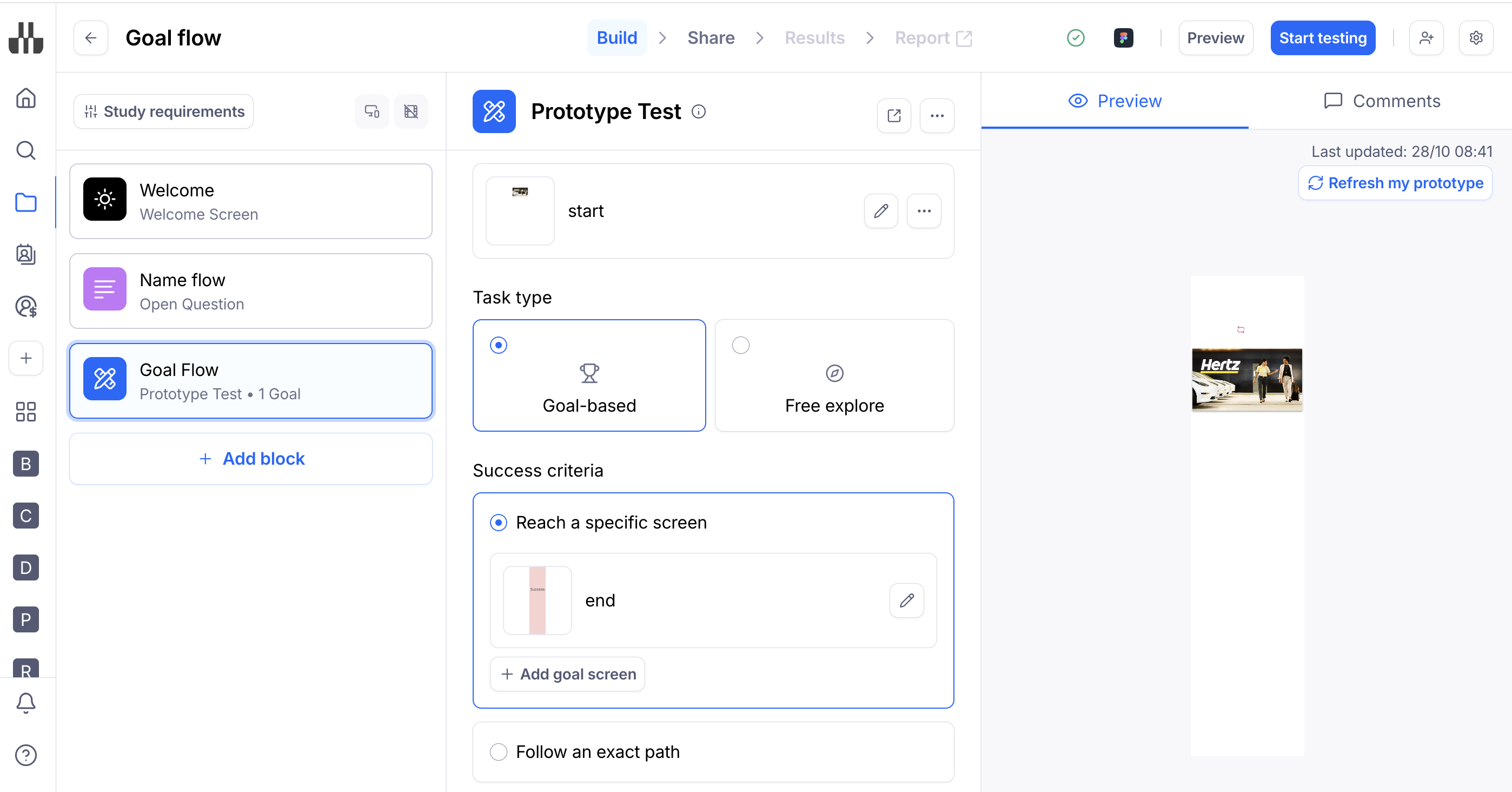
Under ‘Task type’, select Goal-based.
In goal-based prototype tasks, there are two ways of defining success criteria.
Screen-based success: The mission is considered successful when participants reach a specific screen in the prototype. Learn more about defining success screens
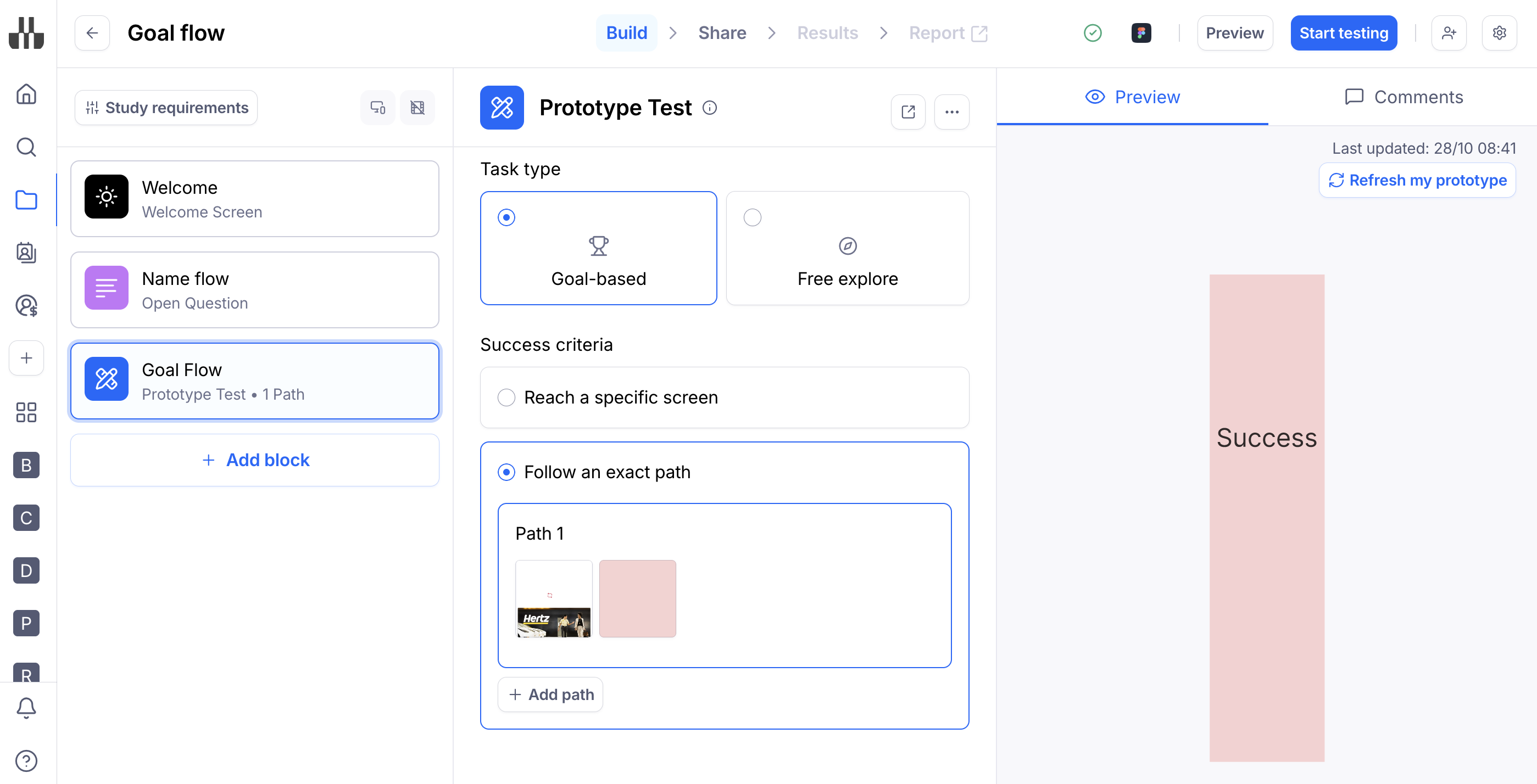
Path-based success: The mission is considered a direct success when participants follow a specific path you’ve defined. Learn more about defining success paths
Define end screens
When you define one or more success screens, the task will be considered complete as soon as participants reach those screens. Upon reaching a success screen, the mission ends automatically.
Success is measured as the percentage of participants who reached the goal-screen(s), regardless of the chosen path.
Define expected paths
When you define one or more success paths, the task will be considered successful when participants follow the path(s) you've defined. Upon reaching a success screen, the mission ends automatically.
Please note:
You must set a minimum of two screens for each path.
A path consists of a sequence of screens. This means that the hotspots used from one screen to the other aren’t considered. That is, the path is defined by the progression from Screen A to Screen B, not by the hotspots used to get there.
To create a path, you need to navigate through the prototype. Please note that, on prototype tests, non-click triggers aren’t formally supported.
The last screen of a path can’t be reused on that same path. Why can’t I reuse the last screen in a path?
Click through the prototype hotspots to add screens to the path.
When setting up paths, you can only click predefined hotspots. If your prototype doesn’t have any, go back to the prototyping tool you used and create them. Back in Maze, refresh your prototype. You should now be able to define paths.
If your mission has more than one valid way to be completed, you can add as many expected paths as you need. All paths you set will be considered successful ways to complete the mission in the results.
To add more paths after defining your first path, click Add path and navigate through the prototype hotspots.
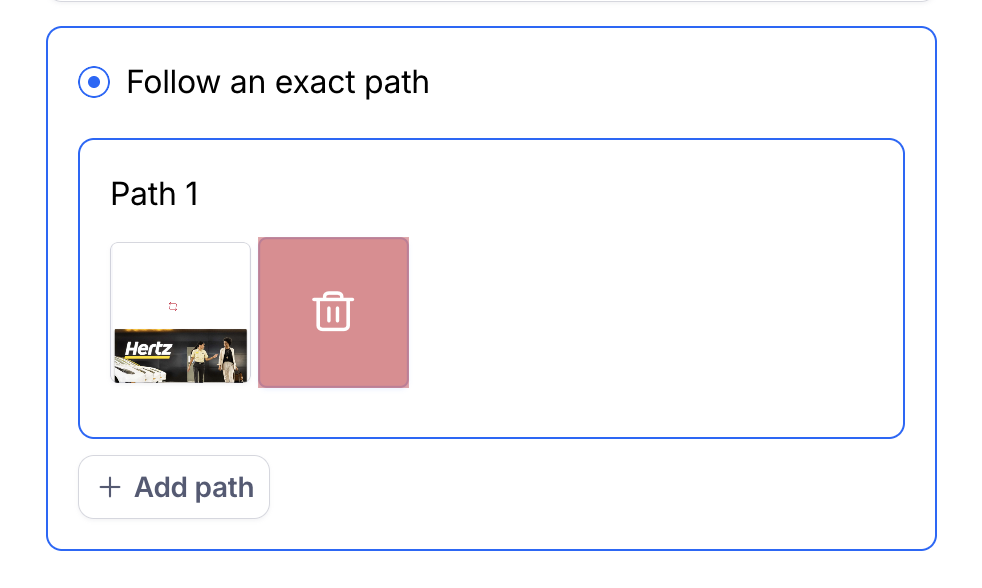
To remove a screen from a path, hover and click the screen you want to remove.
Deleting a screen from a path will remove any subsequent screens as well.
Analyze results
In screen-based success, success is measured as the percentage of participants who reached the goal screen(s) regardless of the path they took. Results include metrics for success rate, misclicks, duration, along with path analysis, heatmaps, click data, and Clips (if enabled).
In path-based success, success is measured as the percentage of participants who reached the end screen(s) directly (by following an expected path) or indirectly (by following a different path). Results include metrics for direct and indirect success, misclicks, duration, along with path analysis, heatmaps, click data, and Clips (if enabled).
Understanding your prototype test results
Troubleshooting
Why am I getting an “Invalid path” error when I try to launch my maze live?
Why can’t I reuse the last screen in a path?
Why can’t I find all my prototype screens in Maze?
Still need help?
If you have any questions or concerns, please let our Support team know — we'll be happy to help!